Кинетостатический анализ работы ведущего колеса с внутренним подрессориванием.
4.1.1 Расчетная схема
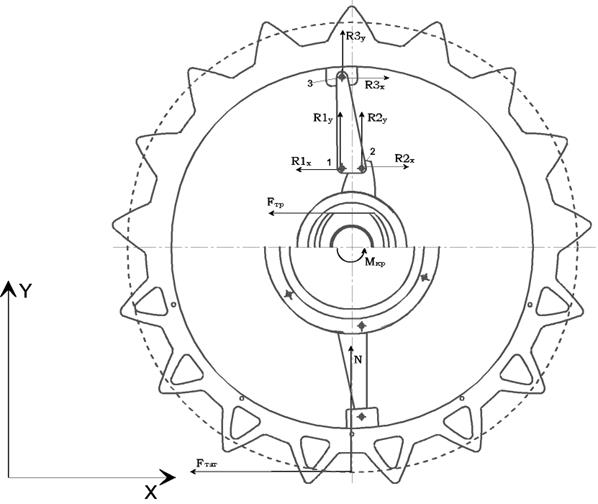
Расчетная схема для кинетостатического анализа приведена на рисунке 4.1.

Принятые допущения:
все тела абсолютно жесткие;
на обод воздействует только нижняя ветвь гусеницы с силой Fтр;
крутящий момент передаётся к любой точке обода колеса без потерь;
упругий элемент в данный момент времени не деформирован, то есть с его стороны на обод, ведущую и ведомые ступицы не действуют силы упругости;
центр вращения колеса, шарниры 1 и 3 всегда лежат на одной прямой;
сила трения линейно зависит от реакции опорной поверхности;
модуль реакции опорной поверхности равен силе тяжести машины, приходящейся на данный узел.
4.1.2 Определение неизвестных реакций в шарнирах упругого элемента
Запишем уравнения кинетостатики для данной системы:
|

|
|
![]()
|
где х — расстояние от поверхности трения до шарнира 1 (определяется из конструкции механизма).
|
|
|
![]() .
.
Тогда выражения (4.1) примут вид
|
|
![]()
|

|
Дополнительно
Развитие атомной энергетики в Украине
Наше время называю атомным не только и не столько потому,
что оно было ознаменовано гениальными открытиями в области строения атома, а и
потому, что человек нашёл полезное применение фантастически огромной энергии,
источником которой стал неизмеримо малый атом.
Ионизирующее
излучение (атомная р ...
Термоиндикаторы
Роль
температурных и тепловых измерений настолько велика, что в настоящее время без
них не может обойтись практически ни одна область знаний, ни одна отрасль
промышленности.
Каждый
из существующих способов измерения температуры имеет свои достоинства и
недостатки, поэтому выбор того или ин ...