Программная эмуляция работы ведущего колеса с внутренним подрессориванием на поверхности с неровностями почвы
Как уже неоднократно упоминалось выше, результаты кинематического и кинетостатического анализа передаются в ПЭВМ с целью построения адекватной модели движение колеса по поверхности с неровностями почвы.
Данная программная эмуляция, преследуя определенные и описанные выше цели, в качестве объектов исследования использует ключевые точки колеса. В данном случае в их роли применяются координаты точек шарниров упругих элементов как необходимые и достаточные условия, однозначно определяющие положение каждого из элементов колеса в пространстве и времени. Более того, для каждой из указанных точек также измерялись величины реакций, размер деформации упругого элемента, величину крутящего момента. В силу громоздкости вычислений и невозможности проверки полученных данных на опытно-экспериментальной модели остановимся лишь на геометрическом моделировании работы.
Обратимся к рисункам 5.1–5.3. На них в виде графических примитивов, заменяющих элементы колеса, изображены стадии движения колеса при наезде на неровность. Рассмотрим их подробнее.
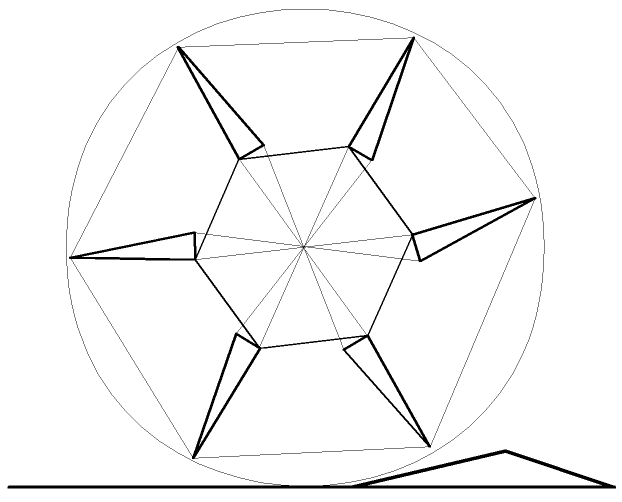
 На рисунке 5.1 мы видим, что колесо занимает нейтральное положение, обод равноудален от ведомых ступиц, упругие элементы равнодеформируемы. В таком режиме колесо движется с наименьшими потерями крутящего момента (98%–100% от номинала), не вызывая каких либо перемещений в механизме подрессоривания.
На рисунке 5.1 мы видим, что колесо занимает нейтральное положение, обод равноудален от ведомых ступиц, упругие элементы равнодеформируемы. В таком режиме колесо движется с наименьшими потерями крутящего момента (98%–100% от номинала), не вызывая каких либо перемещений в механизме подрессоривания.
Рисунок 5.2 показывает стадию наезда колеса на неровность почвы, когда высота неровности меньше вертикального хода обода, составляющего 70–90 мм, в зависимости от конструктивных параметров.

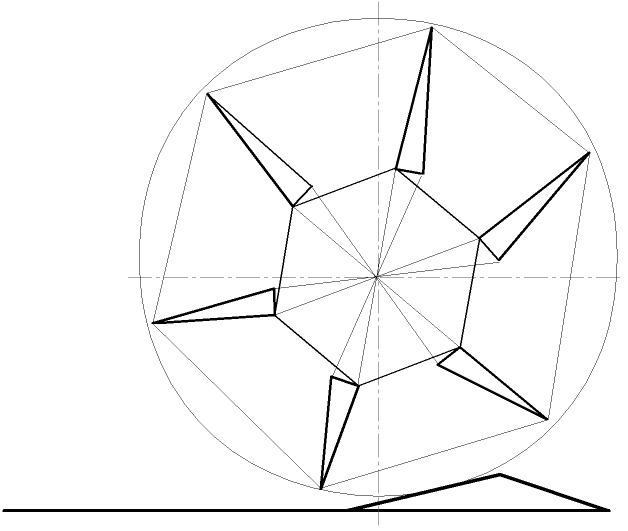
 Зубчатый обод, замененный в программе на окружность соответствующих пропорций, перемещается по вертикали относительно центра вращения самого колеса, приводя в движение упругие элементы (треугольники) и ведомые ступицы (прямые линии). Упругие элементы претерпевают деформацию, расширяясь в верхней части колеса и сжимаясь в нижней. Колесо движется с небольшими потерями крутящего момента (92%–98% от номинала, по оценочным расчётам программы). Перемещения ведущих ступиц укладываются в расчетные. Реакции в шарнирах не превышают максимально предусмотренные.
Зубчатый обод, замененный в программе на окружность соответствующих пропорций, перемещается по вертикали относительно центра вращения самого колеса, приводя в движение упругие элементы (треугольники) и ведомые ступицы (прямые линии). Упругие элементы претерпевают деформацию, расширяясь в верхней части колеса и сжимаясь в нижней. Колесо движется с небольшими потерями крутящего момента (92%–98% от номинала, по оценочным расчётам программы). Перемещения ведущих ступиц укладываются в расчетные. Реакции в шарнирах не превышают максимально предусмотренные.
И, наконец, на рисунке 5.3 показан момент максимального перемещения обода колеса, с максимальной упругой деформацией подрессоривающих элементов.

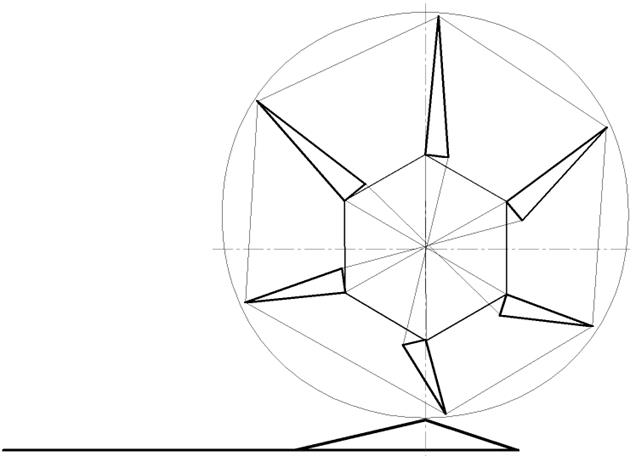
При этом ведомые ступицы максимально перемещаются вдоль направляющих, выбирая весь заложенный зазор, упругие элементы испытывают максимальную деформацию (до 3/5 от запаса прочности), крутящий момент падает до 88%–90% от номинала (однако, так как данный режим работы колеса занимает не более 1,2–2% от всего времени работы, это не вызывает беспокойства с точки зрения физической реализации движения трактора).
Основываясь на результатах описанного выше моделирования процесса работы ведущего колеса с внутренним подрессориванием, можно сделать вывод о принципиальной реализуемости идей, заложенных в конструкцию данного колеса. Однако не следует забывать, что проведенный эксперимент — все лишь моделирование в машинных условиях, и его результаты обязательно требуют подтверждения экспериментом «в железе».
Дополнительно
Принципы промышленной первичной переработки нефти
...
Холодная прокатка листов
Холодная
прокатка по сравнению с горячей имеет два больших преимущества: во-первых, она
позволяет производить листы и полосы толщиной менее 0,8-1 мм, вплоть до
нескольких микрон, что горячей прокаткой недостижимо; во-вторых, она
обеспечивает получение продукции более высокого качества по всем пока ...