Рабочие процессы и экологическая безопасность автомобильных двигателей
ТАБЛИЦА 2. Данные политропы сжатия :
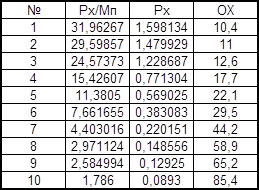
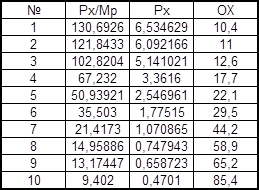
ТАБЛИЦА 3. Данные политропы расширения .:
Рх / Мр = Рв (Vв /Vх)n2 , отсюда Рх / Мр = (рв/Мр)(ОВ/ОХ)n2 , где ОВ= 85,4 ; n2 =1.25
 xLogin.ru Генератор несложных паролей
xLogin.ru Генератор несложных паролей
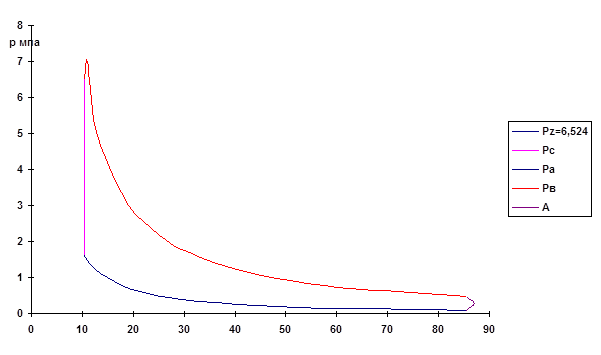
Рис.1. Индикаторная диаграмма.
4. ДИНАМИЧЕСКИЙ РАСЧЕТ ДВИГАТЕЛЯ .
Кинематика кривошипно-шатунного механизма .
Sn = (R+a)- ( R cos.a+acos.b)= R[(1+1/l)-( cos.b+1/l cos.b)] , где l =R / a , тогда Sn = R[(1+ l/4)-( cos.a+ l/4 cos.2a)] , если a=180о то Sn=S - ходу поршня , тогда : 75 = R[(1+l/4)-(-1+l/4)] ; 75 = R[1.0625+0.9375] ; 75 = 2R Þ R = 75/2 = 37.5 мм.=0,0375 м.
l=R/Lш Þ Lш = R/l= 37,5/0,25 = 150 мм.=15 см. т.к. l= 0,25
Находим скорость поршня и ускорение в зависимости от угла поворота кривошипа :
Vп = dSn/dt = Rw( sina + l/2sin2a) , jn = d2Sn/dt = Rw2(cosa + lcos2a) ,
Угловую скорость найдем по формуле : w = pn/30 = 3,14*5400/30 = 565,2 рад/с .
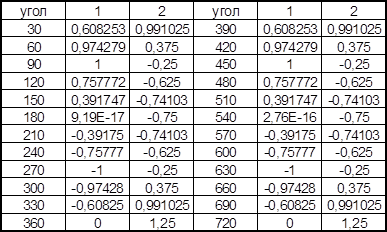
ТАБЛИЦА 4 Числовые данные определяющие соотношения :
1- ( sina + l/2sin2a) ; 2- (cosa + lcos2a)
Подставив эти значения в формулы скорости и ускорения и подсчитав результаты занесем их в таблицу 5.
ТАБЛИЦА 5. Скорость поршня при различных углах поворота кривошипа.(м/с)
|
a |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
|
Vп |
0 |
12,89 |
20,65 |
21,2 |
16,06 |
8,31 |
0 |
-8,31 |
-16,06 |
-21,2 |
-20,65 |
-12,89 |
|
a |
360 |
390 |
420 |
450 |
480 |
510 |
540 |
570 |
600 |
630 |
660 |
690 |
|
Vп |
0 |
12,89 |
20,65 |
21,2 |
16,06 |
8,31 |
0 |
-8,31 |
-16,06 |
-21,2 |
-20,65 |
-12,89 |
ТАБЛИЦА 6. Ускорение поршня при различных углах поворота кривошипа .
|
a |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
|
jп |
14974 |
11872 |
4492 |
-2995 |
-7487 |
-8877 |
-8985 |
-8877 |
-7487 |
-2995 |
4492 |
11872 |
|
a |
360 |
390 |
420 |
450 |
480 |
510 |
540 |
570 |
600 |
630 |
660 |
690 |
|
jп |
14974 |
11872 |
4492 |
-2995 |
-7487 |
-8877 |
-8985 |
-8877 |
-7487 |
-2995 |
4492 |
11872 |
Дополнительно
Нейросетевые методы распознавания изображений
Выполнен обзор нейросетевых методов, используемых при распознавании
изображений. Нейросетевые методы - это методы, базирующиеся на применении
различных типов нейронных сетей (НС). Основные направления применения различных
НС для распознавания образов и изображений:
применение для извлечение
...