Расслоенные пространства внутренних степеней свободы
где ![]() - безразмерная постоянная,
- безразмерная постоянная, ![]() – диэлектрическая проницаемость. Она является безразмерной величиной. Если же среда анизотропная, то диэлектрическую проницаемость могли составлять величины
– диэлектрическая проницаемость. Она является безразмерной величиной. Если же среда анизотропная, то диэлектрическую проницаемость могли составлять величины ![]() . Ограничимся классом решений
. Ограничимся классом решений ![]() , где
, где ![]() , то есть
, то есть ![]() . Тогда одним из решений данного уравнения будет являться функция
. Тогда одним из решений данного уравнения будет являться функция ![]()
Построим функцию ![]() следующим образом:
следующим образом:
![]() , где
, где ![]() .
.
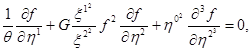
Тогда нелинейные дифференциальные уравнение для L и F2 представляется в форме:
![]()
![]()
Каждое дифференциальное уравнение индуцирует соответствующей структуры пространство [ 3 ]. В данном случае решение дифференциального уравнения сводится к поиску геометрических структур данного пространства
.
Введем обозначение
![]()
В выделенном классе решений получаем следующие дифференциальные уравнения слоевых координат пространства ![]() :
:
![]()
![]()
Имеем и следующие значения слоевых координат (составляющие ковариантного вектора ![]() ):
):
![]()
![]() ,
, ![]() где
где ![]() .
.
Проверим правильность нахождения векторов ![]() . Должно иметь силу соотношение
. Должно иметь силу соотношение ![]() . Имеем
. Имеем
![]()
Составляющие ![]() определены правильно.
определены правильно.
В рассматриваемом классе решений получаем следующие нелинейные дифференциальные уравнения для составляющих метрического тензора ![]() :
:
![]()
![]()
![]()
![]() .
.
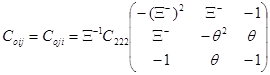
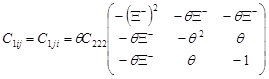
Тогда составляющие коэффициентов связностей ![]() находится по формулам:
находится по формулам:
![]()
![]()
![]()
![]()
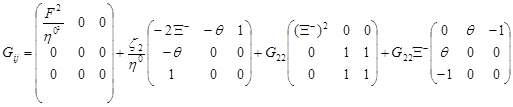
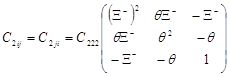
В итоге получаем составляющие метрического тензора
И составляющие коэффициентов связностей:
 ,
,  ,
,
 .
.
Проверка правильности найденных составляющих метрического тензора производится традиционным способом, а именно, в выражение ![]() следует подставить конкретные значения для составляющих метрического тензора и получить квадрат метрической функции. Подстановка в данное выражение найденных здесь составляющих метрического тензора приводит
следует подставить конкретные значения для составляющих метрического тензора и получить квадрат метрической функции. Подстановка в данное выражение найденных здесь составляющих метрического тензора приводит
Дополнительно
Лазерная система для измерения статистических характеристик пространственных квазипериодических структур
В последние годы наблюдается интенсивное развитие аэрокосмической и ракетной
техники, что в свою очередь ставит перед промышленностью задачу создания точных
и надежных систем связи, ориентации и обнаружения подвижных объектов в
пространстве. В большинстве случаев данные задачи решаются с прим ...
Достижения генной инженерии и биотехнологии
В
своей работе я раскрываю тему достижений генной инженерии и биотехнологии.
Возможности, открываемые генетической инженерией перед человечеством как в
области фундаментальной науки, так и во многих других областях, весьма велики
и нередко даже революционны. Так, она позволяет осуществлять инду ...