Параметрический синтез и анализ одноконтурной САР.
Требования к качеству процесса регулирования в каждом случае могут быть самыми разнообразными, однако из всех качественных показателей можно выделить несколько наиболее существенных, которые с достаточной полнотой определяют качество почти всех АСР.
Качество процесса регулирования системы, как правило, оценивают по ее переходной функции.
Основными показателями качества является: - время регулирования tр – называется время, в течении которого, начиная с момента приложения воздействия на систему отклонения регулируемой величины Dh(t) от ее установившегося значения h0=h(¥) будут меньше на пред заданной величины Е. Обычно принимают, что по истечении времени регулирования отклонении регулируемой величины от установившегося значения должно быть не более Е=5%. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
- перерегулированием s называется максимальное отклонение Dhmax регулируемой величины от установившегося значения, выраженное в процентах от h0=h(¥).
Абсолютная величина Dhmax определяется из кривой переходного процесса:
Dhmax=hmax- h(¥)
Соответственно перерегулирование будет равно:
- Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования tр. Если за это время переходный процесс в системе совершает число колебаний меньше заданного, то считается, что система имеет требуемые качеством регулирования в части ее колебательности;
- Установившаяся ошибка Е. Установившееся значение регулируемой величины h0 в окончании переходного процесса зависит от астатизма n системы. В статических системах (n=0) – установившаяся ошибка при постоянной величине входного воздействия не равна 0 и следовательно, установившееся значение регулируемой величины h0 будет отличаться от ее заданного значения на величину установившейся ошибки.
По каналу возмущающего воздействия величина ошибки определяется выражением
![]()
где x0-постоянное задающее воздействие; К – коэффициент передачи системы.
По каналу возмущающего воздействия величина ошибки согласно выражения
где f0 – постоянное возмущающее воздействие; Коб – коэффициент передачи объекта регулирования; Кр – коэффициент передачи регулятора.
Сравнивая переходные функции статического и астатического регулирования, выбираем оптимальный регулятор для САР температуры.
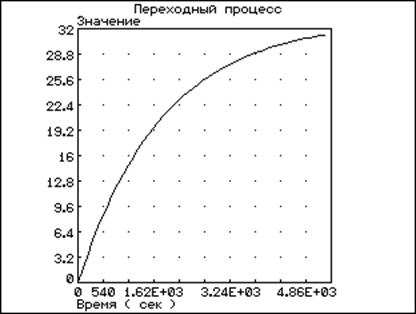
Рис 13. Переходная функция САР с П-регулятором
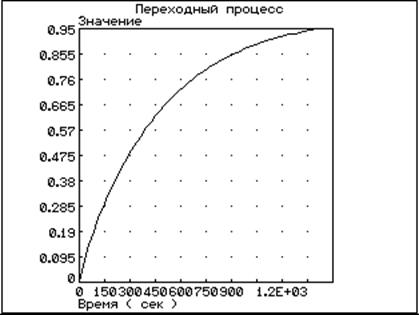
Рис 14. Переходная функция САР с ПИ-регулятором
По графикам видно, что время регулирования с ПИ-регулятором меньше, чем с П-регулятором; значит для САР температуры целесообразно применить импульсный регулятор выполняющий ПИ-закон регулирования.
Для расчетов использовали на компьютере программу «Classic».
Дополнительно
Эволюция биологических механизмов запасения энергии
В основу эволюционной концепции биоэнергетики положена гипотеза о
том, что на заре становления жизни адениновая часть АДФ и АДФ-со-держащих
коферментов использовалась в качестве антенны, улавливающей ультрафиолетовый
свет, который в те времена достигал поверхности океана. Поглощение
ультрафиолета ...
Галактика как уровень мегамира
Актуальность,
цели и задачи ответа по настоящей контрольной работе будут обусловлены
следующими положениями. Нас интересует не только звездное население того дома,
в котором мы живем. Нас интересует и архитектура этого дома и его размеры;
интересует, как его обитатели расселены, где жилищная тесно ...