Кинематический расчет исследуемой конструкции
В данной части работы исследуется возможность работы предложенной конструкции с точки зрения её геометрической осуществимости. Необходимо определить размеры и месторасположение каждого из элементов колеса и сделать анализ их взаимодействия.
Определение точек кривой траектории движения конца упругого элемента
|
![]()
где а — перемещение ведомой ступицы;
R — радиус ведомой ступицы.

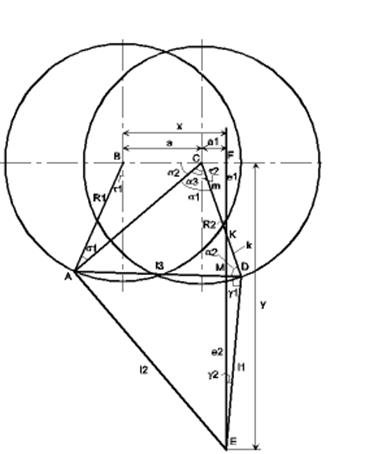
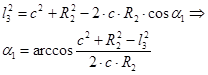
Далее также по теореме косинусов определим из треугольника ACD углы a1 и a2
|
|
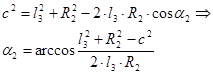
где l3 — сторона упругого элемента, соединяющая ведущую и ведомую ступицы.
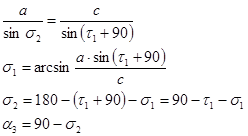
По теореме синусов из треугольника АВС найдём углы s1, s2и a3:
|
|
|
Из треугольника DME также по теореме синусов найдем е2 — высоту треугольника ADE, опущенную из точки Е и угол g2:
|
|
Далее из треугольника CFK находим e1 и а1 (см. рисунок. 3.3):
|
|
Дополнительно
Становление детской журналистики и её влияние на психологию ребёнка
Русская пресса для юного читателя в
отличие от «взрослой» началась с журнала.
Детская журналистика в нашей стране
имеет богатую историю. До революции, в основном в Петербурге и Москве,
издавалось около трехсот детских и юношеских журналов. Одни из них выходили
десятилетиями, другие прекращали ...
Технология производства мяса гусей
Животноводство - вторая
важнейшая отрасль сельского хозяйства. Она обеспечивает население
высокобелковыми и диетическими продуктами питания, а ряд отраслей промышленности
- сырьем. Особенность ее в том, что энергоемкость продукции животноводства
(затраты энергии на одну калорию продукции) в 15-2 ...