Кинематический расчет исследуемой конструкции
Из треугольников О46 и О63 найдём l2 — один из катетов треугольника О46
|
Далее из треугольника О46 находится второй катет b3:
|
![]()
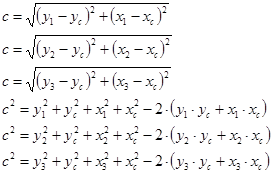
Из треугольника О36 находим радиус с (см. рисунок 3.4):
|
что, с учетом выражений (3.1–3.3) запишется как
|
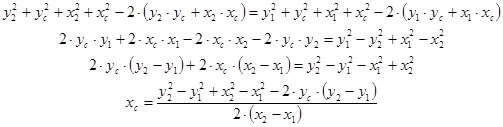
Основываясь на полученных выше соотношениях, определим координату центра по оси ординат:
|
|
|
|
|
![]()
|
![]()
Проведём дальнейшие преобразования с целью определения координаты центра ведущего колеса по оси абсцисс.
|
Дополнительно
Расчет релаксационного генератора на ИОУ
Разработать и рассчитать
релаксационный генератор на ИОУ
(интегральной схеме операционного
усилителя) в соответствии с данными, представленными:
·
вид генератора - мультивибратор
·
режим работы – автоколебательный
·
период следования импульсов Т, мс – 0.09
· ...
Использование роботов на промышленных предприятиях
Рассмотрим
конкретные задачи , которые роботы решают в настоящее время на промышленных предприятиях.
Их можно разделить на три основных категории :
-
манипуляции заготовками и изделиями
-
обработка с помощью ...