Кинематический расчет исследуемой конструкции
|
|
Данные результаты расчетов служат основой для компьютерного моделирования работы упругого колеса при движении по пересечённой местности.
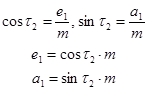
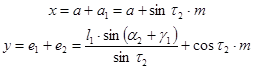
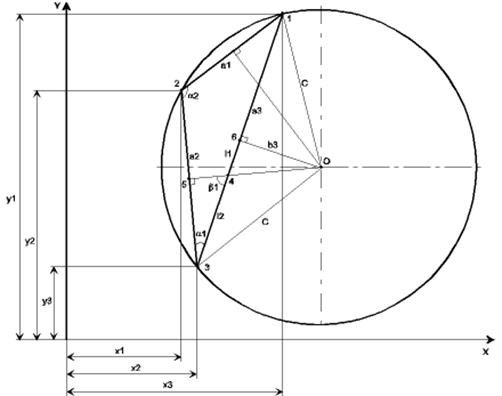
Определение радиуса ведущего колеса по трём точкам
В связи с внесением изменений в конструкцию ведущего колеса, изменяется также и его радиус. Определить радиус колеса возможно методом «трёх точек», суть которого заключается в существовании и единственности окружности, проходящей через три точки с известными координатами, так называемыми «координатными точками».
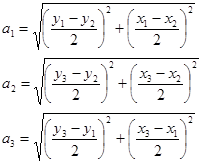
Определим размеры отрезков а1, а2, а3 — хорд между координатными точками:
|
|
|
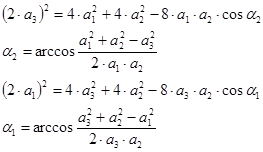
Из треугольника 123 (см. рисунок 3.4) найдём углы a1 и a2:
|
|
|
![]()
![]()
|

Дополнительно
Холодная прокатка листов
Холодная
прокатка по сравнению с горячей имеет два больших преимущества: во-первых, она
позволяет производить листы и полосы толщиной менее 0,8-1 мм, вплоть до
нескольких микрон, что горячей прокаткой недостижимо; во-вторых, она
обеспечивает получение продукции более высокого качества по всем пока ...
Использование роботов на промышленных предприятиях
Рассмотрим
конкретные задачи , которые роботы решают в настоящее время на промышленных предприятиях.
Их можно разделить на три основных категории :
-
манипуляции заготовками и изделиями
-
обработка с помощью ...