Кинематический расчет исследуемой конструкции
![]() .
.

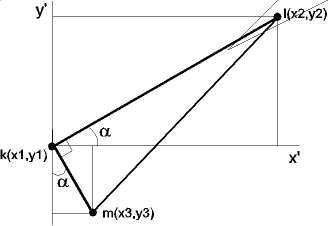
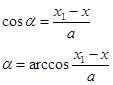
Далее определим величину угла a, угла между прямой KL и осью ОХ’ и равному ему, как углу со взаимно перпендикулярными сторонами, углу между прямой KM и осью OY’:
|
Отсюда координаты точки шарнира М найдутся как:
|
Расчет данных параметров при помощи вычислительной техники позволит точно закоординировать положение любого из элементов ведущего колеса в процессе движения. Использование результатов данных расчетов делает возможной реализацию программного симулятора движения упругого колеса по неровной поверхности при помощи одноимённого пакета прикладного моделирования работы механизмов американской фирмы AEngiCAD.
Дополнительно
Внутренняя структура протона и новый способ получения энергии
Протон был открыт в начале 20-х г.г. в экспериментах с альфа-частицами. В
опытах по рассеянию на протонах электронов и гамма-квантов были получены
достоверные доказательства существования некой внутренней структуры у этой
частицы. В 1970 г. в Стенфордском центре линейного ускорителя (СЛАК) удалось ...
Распространение дифиллоботриоза в Костромской области и борьба с ним
Дифиллоботриоз плотоядных -
антропозооноз, имеющий очаговое распространение, вызывается различными видами
лентецов из рода Diphyllobothrium, среди которых
наиболее распространен лентец широкий -
Diphyllobothrium latum. Болеют собака, кошка, лисица, песец, куница, а также
человек.
Болезнь часто ...