Кинематический расчет исследуемой конструкции
|
|
|
|
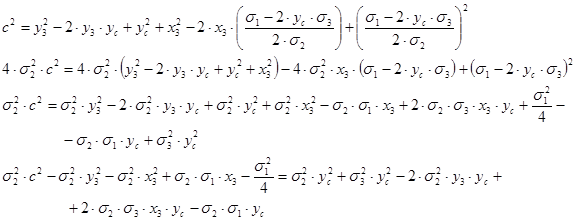
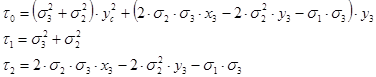
![]() ,
,
откуда:
|
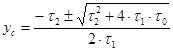
Избыточный корень отсекается по условию физической осуществимости.
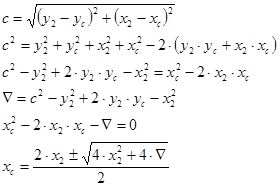
Аналогичным образом поступим при определении координаты центра ведущего колеса по оси абсцисс:
|
|
|
3.3.3 Определение координат шарниров упругих элементов колеса в любой момент времени
Для построения модели работы ведущего колеса с внутренним подрессориванием необходимо определить, какое положение в каждый момент времени занимает каждый из упругих элементов системы подрессоривания. колеса. Первым шагом на пути решения этой задачи является определение координат точек шарниров упругих элементов.
Исходные данные:
|
![]()
максимальное смещение зубчатого обода относительно оси вращения колеса:
|
Дополнительно
Счетчики ядерного излучения
Реальная
перспектива использования человеком огромных энергий, скрытых в недрах атома,
появилась впервые в 1939 году. На сегодняшний день широкое практическое применение
получают различного рода ядерные излучения, несмотря на то, что они опасны для
организма человека и в то же время неощущаемы, п ...
Колониальная организация и межклеточная коммуникация у микроорганизмов
Обзор посвящен современным концепциям и данным,
свидетельствующим о целостном характере микробных популяций (колоний,
био-плёнок и др.) как своеобразных "суперорганизмов". При этом особое
внимание уделяется таким явлением как апоптоз, бактериальный альтруизм, эффект
кворума, коллективная ...